一句话先答
用 DQSA 区域立体防护装置把单元 2/3/4 面围起来,智能消隐让机械手通过不误停;地面危险区加 JT14 安全地毯防止有人站进去;防护门用 DX-D6 门控联锁锁死。
① 风险识别
机器人单元运行速度快、负载大、运动轨迹不可预测。人误闯协作区,或在示教 / 维护时绕到机械手后方,会被撞击、夹挤、卷入。围栏开口、上下料口是误闯高发点。
② 风险评估
按 ISO 12100 + ISO 10218-2 评估机器人单元集成风险:高速大负载工业机器人的安全功能通常要求达到 ISO 13849-1 的 PLd~PLe;若是力 / 速度限制式人机协作,另按 ISO/TS 15066 评估。停止类别与停止时间直接决定光幕的安装距离。
③ 推荐配置
- 单元 2 / 3 / 4 面用 DQSA 区域立体防护把人挡在外面,智能消隐让机械手通过不误停。
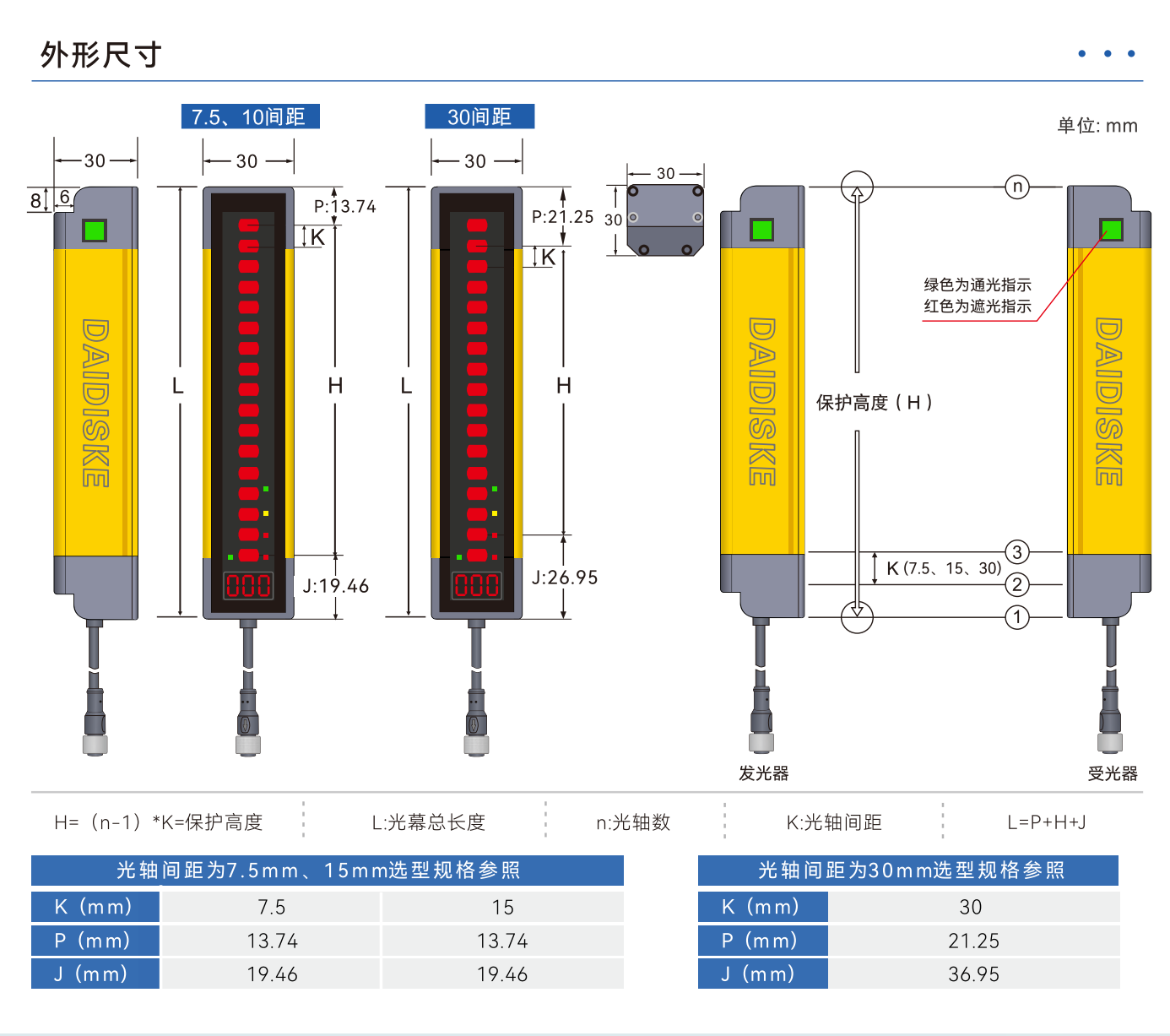
- 进料口装光幕,安装距离按 ISO 13855 计算(含手伸入的附加距离)。
- 地面危险区加 JT14 安全地毯,补足站立盲区。
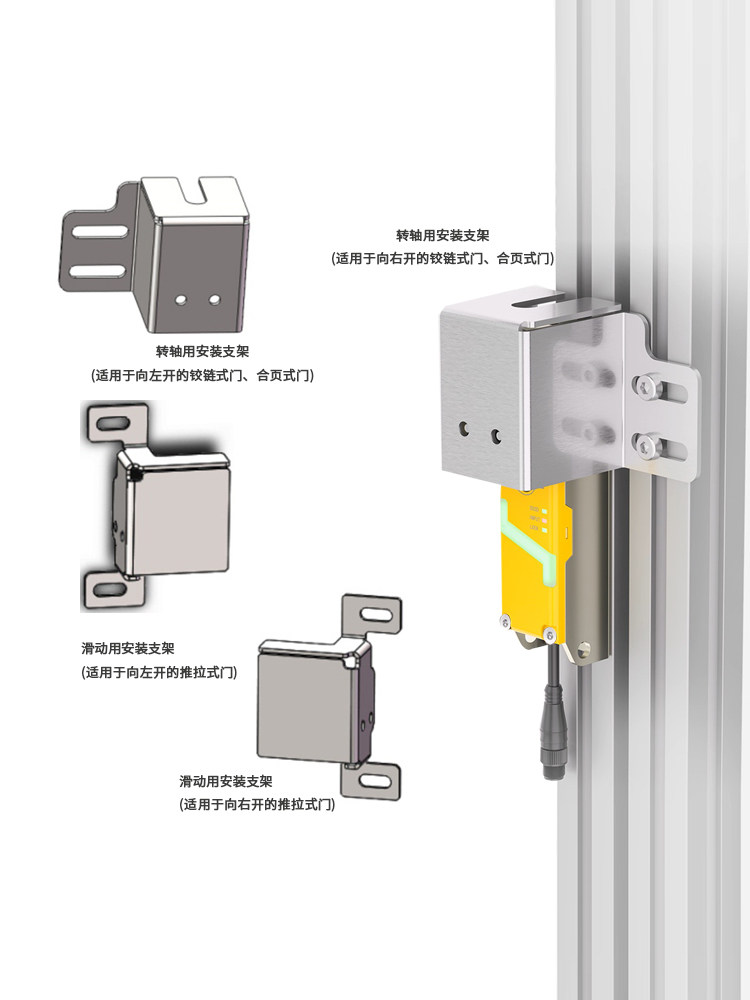
- 防护门用 DX-D6 电磁门控联锁(带 RFID 编码)锁死,信号汇入 DA31 安全继电器。
👉 安装距离先用 安全距离计算器(ISO 13855) 按现场停止时间算一遍。
④ 为什么这样配
机器人危险来自“看不见的运动 + 不能立刻停”。区域防护负责发现闯入,门控联锁负责开门即停且不可旁路,安全地毯补足站立盲区——三者覆盖闯入、绕入、站入三类路径,缺一类就留缺口。停止时间越长,光幕要装得越远,必须实测。
⑤ 合规依据
- GB 11291 / ISO 10218-1·-2:工业机器人及其集成安全
- ISO/TS 15066:协作机器人(力与速度限制)
- ISO 13855 安装距离、ISO 13857 安全距离(上肢可及)
- ISO 14119 联锁装置、ISO 13849-1(PL)
上述标准为方案设计的参考依据;具体等级与配置须由具资质工程师按现行有效标准与现场实际评估确定。
方案设备清单


相关选型问答
机器人单元一般要立体围护:用区域防护装置 DQSA 把 2/3/4 面围起来管侧面闯入,地面危险区铺 JT14 安全地毯管踩入,防护门用 DX-D6 门控联锁,信号汇入安全继电器。
安全防护设计要和人形机器人采购同步立项,不能等机器人到货再补。重点规划三块:固定工位的区域防护、人机交接口的手部防护、地面安全地毯,并按风险评估确定 PL 等级。
机器人工位防护 相关行业新闻



机器人工位防护 —— 延伸阅读与选型知识
不确定怎么选?把设备型号、危险区尺寸和停机时间发给我们,工程师免费帮你算检测能力、防护高度和安全距离。☎ 4000-808-929在线留言报价