一句话先答:2026 人形机器人量产线本身,就是安全光电的新增量市场。不是给机器人配光栅,而是造机器人的本体装配、关节模组测试、整机老化这几条线,工人和会动作的设备同处一室,按 ISO 13849/13855 必须用安全光栅、安全激光扫描仪和 RFID 门锁把工位围起来。本文按工段拆解该在哪布点、选什么等级。

一句话先答:2026 年真正放量的不是人形机器人本身,而是「造人形机器人的产线」,而这些产线自身就是安全光电的一块新增量市场。过去谈人形机器人和安全光栅,默认是「给机器人装传感器让它别撞人」。本文换个角度:当一台台人形机器人在车间被批量装配、测试、老化时,盯着它干活的是人,而被测的关节模组、整机会突然发力、抬臂、迈步——这才是真正需要按 ISO 13849-1 做防护的危险源。
为什么量产线自己反而更危险
人形机器人成品出厂前会装很多自带的安全功能(力觉、急停、限速)。但在产线上,这些功能往往还没标定、固件还在刷、甚至整机就是被故意推到极限去测——也就是说,成品的安全功能在产线阶段恰恰是不可信的。一台关节扭矩动辄上百牛米的腿部模组,在测试台上突然全速摆动,旁边站着接线、读数据的工程师,这个场景和一台没装防护的工业机械臂没有本质区别。所以防护责任完全落在产线的固定式安全光电装置上,而不能指望被测物自己「乖一点」。
先把一条线拆成几个工段
一条典型的人形机器人量产线,从安全防护角度大致分五段,每段危险特征不同,布点策略也不同:
- 零部件/关节模组测试工位:单个关节、灵巧手在测试台上跑扭矩、寿命、堵转,局部高速高力——属高频接触、伤害不可逆的高风险,按风险评估通常要 PLd~PLe;
- 本体装配/总装工位:人工拧装、走线、装外壳,机械臂或吊具辅助,人手频繁进出——人机交界口多,需手指/手部级光栅守口;
- 整机功能测试/标定工位:整机上电做动作、行走标定,作业范围大且会移动——固定围栏拦不住全部,需区域防护+激光扫描仪;
- 老化/可靠性(跑机)线:几十上百台整机长时间无人值守自动跑动作,偶有人巡检——典型「平时无人、偶尔进人」,靠围栏+RFID 安全门锁管准入;
- 线边物流/AGV 交接:料车、AGV 在工位间穿行——前向安全激光扫描仪+安全门做交接。

工段一:关节/模组测试台——手指级光栅 + 双手按钮
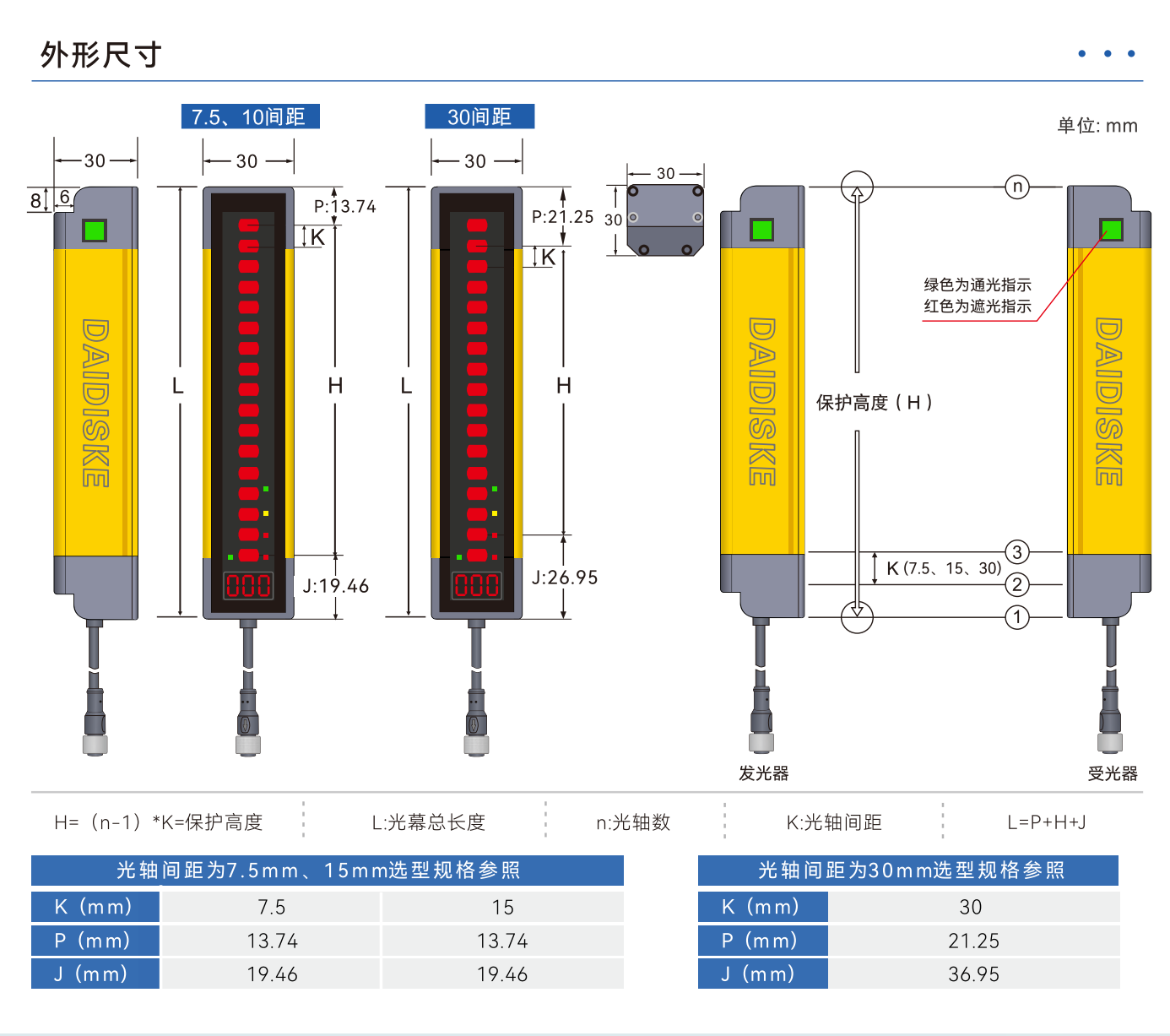
关节模组、灵巧手测试是整条线里危险密度最高的工位:体积小、力大、节拍快,工人要频繁上下料、接线、贴标。这里推荐 DQT4 独立 Type 4 安全光栅 守台口,分辨率取 14mm 保护手指,响应时间 ≤12ms;上下料环节用双手操作按钮,确保启动时双手都不在危险区。光栅装多远要按 ISO 13855(国标 GB/T 19876)算:S = K × T + C。手指级 14mm 时附加距离 C = 8×(14−14) = 0,若实测 T(光栅响应 + 整机停止)= 0.12s,则 S = 2000×0.12 + 0 = 240mm。具体可先用本站 安全距离计算器 测算,再由具资质工程师按现场复核。
工段二:本体总装——手部光栅守人机交界口
总装工位人手进出最频繁,危险来自辅助机械臂、吊装、压装等动作。在每个人机交界口装一道 DQC 通用安全光栅 或 DQE 手部防护装置,配合智能消隐让物料/工装正常通过、人手伸入立即停。保护高度按工人可达范围选,可参考本站 保护高度选型工具。注意:光栅守的是「侧面闯入」,若工位内会有人站立作业,地面盲区要另配区域防护或安全地毯补上。
工段三:整机标定/功能测试——区域防护 + 安全激光扫描仪
整机上电做全身动作、行走标定时,作业范围大且本身会移动,单靠一两道直线光栅围不住。这里两条路线:一是用 DQSA 区域立体防护装置,靠反射镜把光路折成 L/U/口字形,一套设备围出工位的多面;二是用安全激光扫描仪(区域扫描型)做平面区域监控,可设警告区+保护区,人进警告区减速、进保护区停机。整机测试区面积大、布局常变,激光扫描仪的可编程区域优势明显。
工段四:老化/跑机线——围栏 + RFID 安全门锁
老化线是「平时无人、偶尔进人」的典型:几十上百台整机长时间自动跑动作,工人只在换批、巡检、排故时进入。这种场合的核心是「准入控制」——平时锁死、要进必须先安全停机。推荐用 RFID 编码安全门锁(DX-R1 + DX-D6 电磁锁):DX-D6 提供约 2000N 重型锁紧力,RFID 高频编码防止用铁片/磁铁「骗开」,整体可达 PLe / SIL3;运维人员必须在控制台先停掉跑机程序,电磁锁才允许打开门。门多的长线可用可串联的非接触式门开关,把多扇门串成一条监控回路。
工段五:线边物流——前向激光扫描仪 + 安全门
工位间的 AGV、料车交接处,用前向安全激光扫描仪做移动设备的防撞与减速,结合工位安全门管理人车交界。这部分与一般自动化产线一致,不再展开。
为什么说这是 2026 的「新增量」
关键在于工位数量随产能线性增长。一条规划年产万台级的人形机器人产线,关节模组测试台、灵巧手测试台动辄上百个工位,每个工位至少一对安全光栅 + 一只 安全继电器;老化区每个门格一套 RFID 门锁;整机标定区每单元一台激光扫描仪。粗算下来,单条线的安全光电需求量级,远超一台机器人成品自带的几个传感器。当 2026 年多家头部厂商的量产线同时落地,这部分「造机器人的产线自己要用的安全光电」,就成了独立于成品市场之外的实打实增量。
把整套回路用安全继电器汇成带自检的双通道 PLe 回路,是所有工段的共同底座——光栅、扫描仪、门锁、急停都接进去,单点故障仍能安全停机。具体到某条线该怎么布点、每工位选什么等级,可把工段布局和危险动作描述给戴迪斯科 / 金恩士工程师,按 ISO 12100 风险评估出整线方案。术语不熟可先看本站 安全术语表。
常见问题(FAQ)
二十年专注工业安全光电与感知设备制造。文中涉及的设备选型、车间方案, 欢迎咨询工程师 —— ☎ 4000-808-929。 更多产品也可访问戴迪斯科兄弟网站 www.fsdadi.com。
免责声明:本文对政策、行业趋势、技术路线的解读为行业分析与预判,具体内容请以官方发布的法规文件、国家标准、企业公告为准。 文中提及的第三方品牌(如有)均为各自权利人注册商标,本文仅作行业信息梳理与技术对比,不构成商业关联或对其商誉的评价。